publications
publications by categories in reversed chronological order. generated by jekyll-scholar.
2025
- L4DC
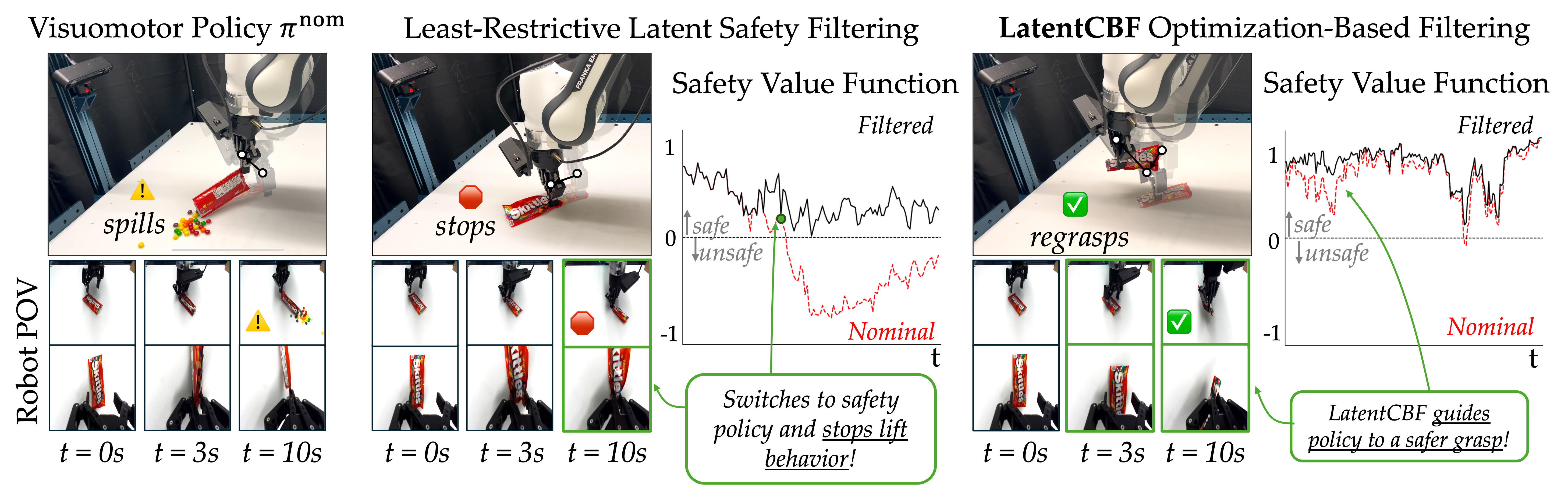 How to Train Your Latent Control Barrier Function: Smooth Safety Filtering Under Hard-to-Model ConstraintsarXiv preprint arXiv:2511.18606, 2025
How to Train Your Latent Control Barrier Function: Smooth Safety Filtering Under Hard-to-Model ConstraintsarXiv preprint arXiv:2511.18606, 2025 -
 What You Don’t Know Can Hurt You: How Well do Latent Safety Filters Understand Partially Observable Safety Constraints?arXiv preprint arXiv:2510.06492, 2025
What You Don’t Know Can Hurt You: How Well do Latent Safety Filters Understand Partially Observable Safety Constraints?arXiv preprint arXiv:2510.06492, 2025 -
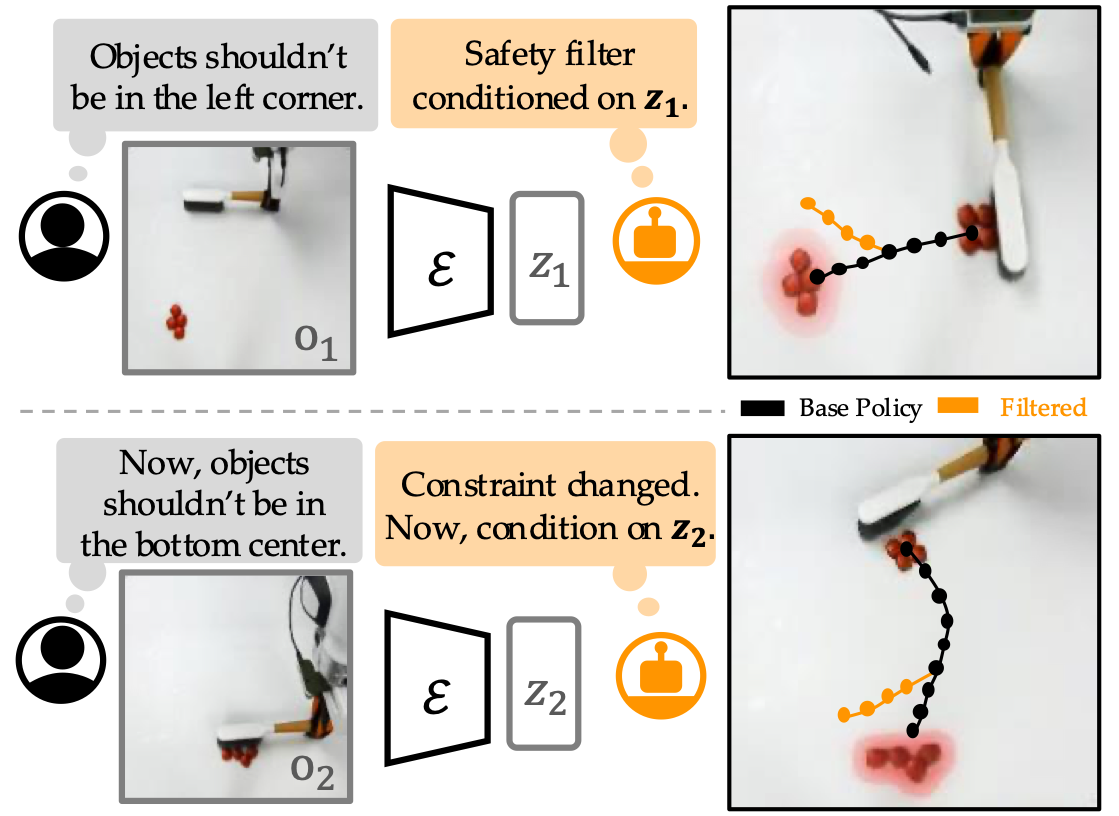 AnySafe: Adapting Latent Safety Filters at Runtime via Safety Constraint Parameterization in the Latent Space2025
AnySafe: Adapting Latent Safety Filters at Runtime via Safety Constraint Parameterization in the Latent Space2025 - CoRL

- RSS
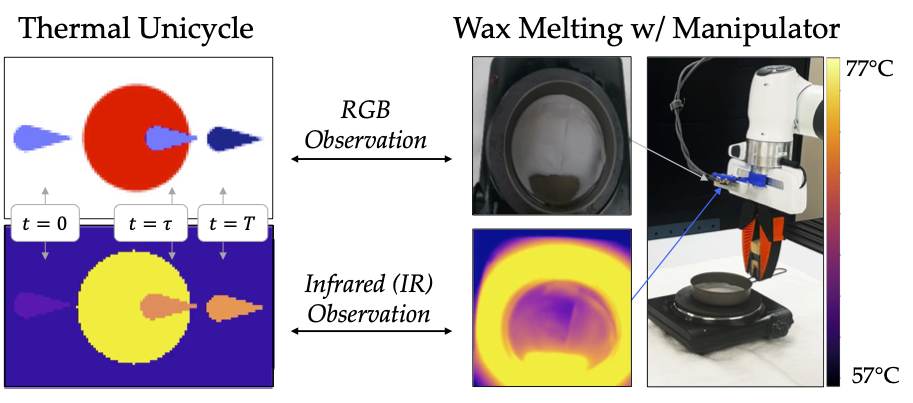
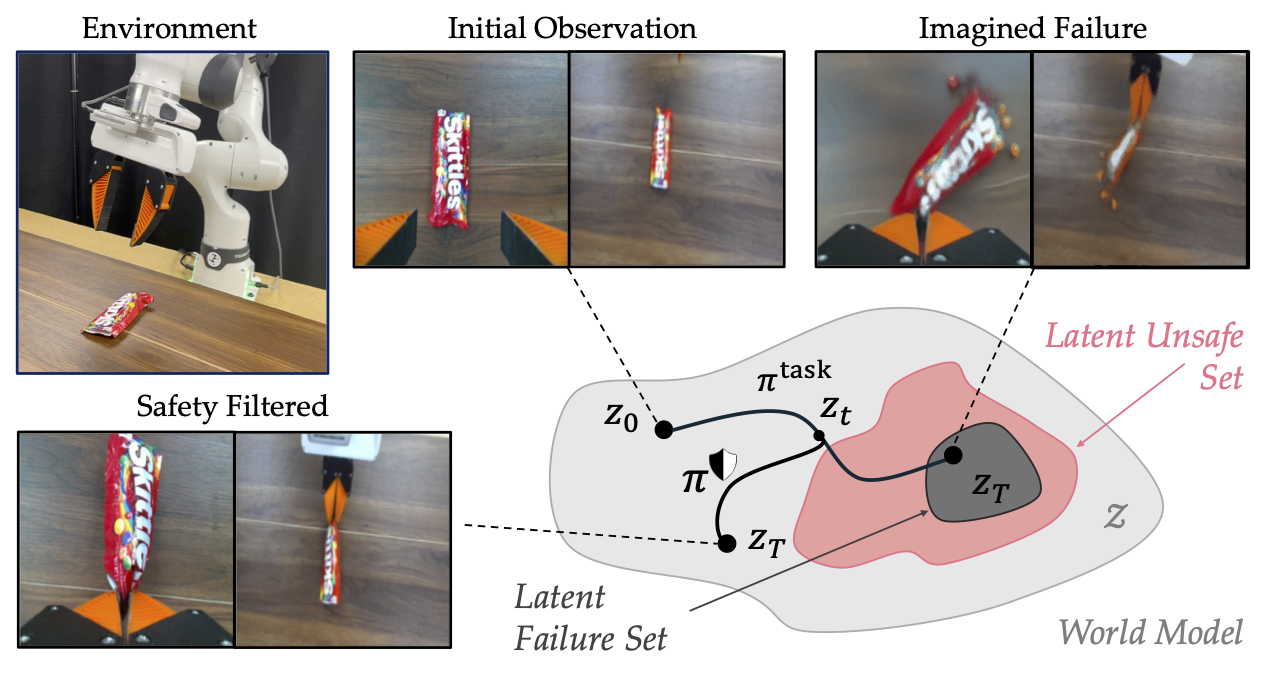 Generalizing Safety Beyond Collision-Avoidance via Latent-Space Reachability AnalysisIn Robotics: Science and Systems, 2025
Generalizing Safety Beyond Collision-Avoidance via Latent-Space Reachability AnalysisIn Robotics: Science and Systems, 2025
2024
- CoRL
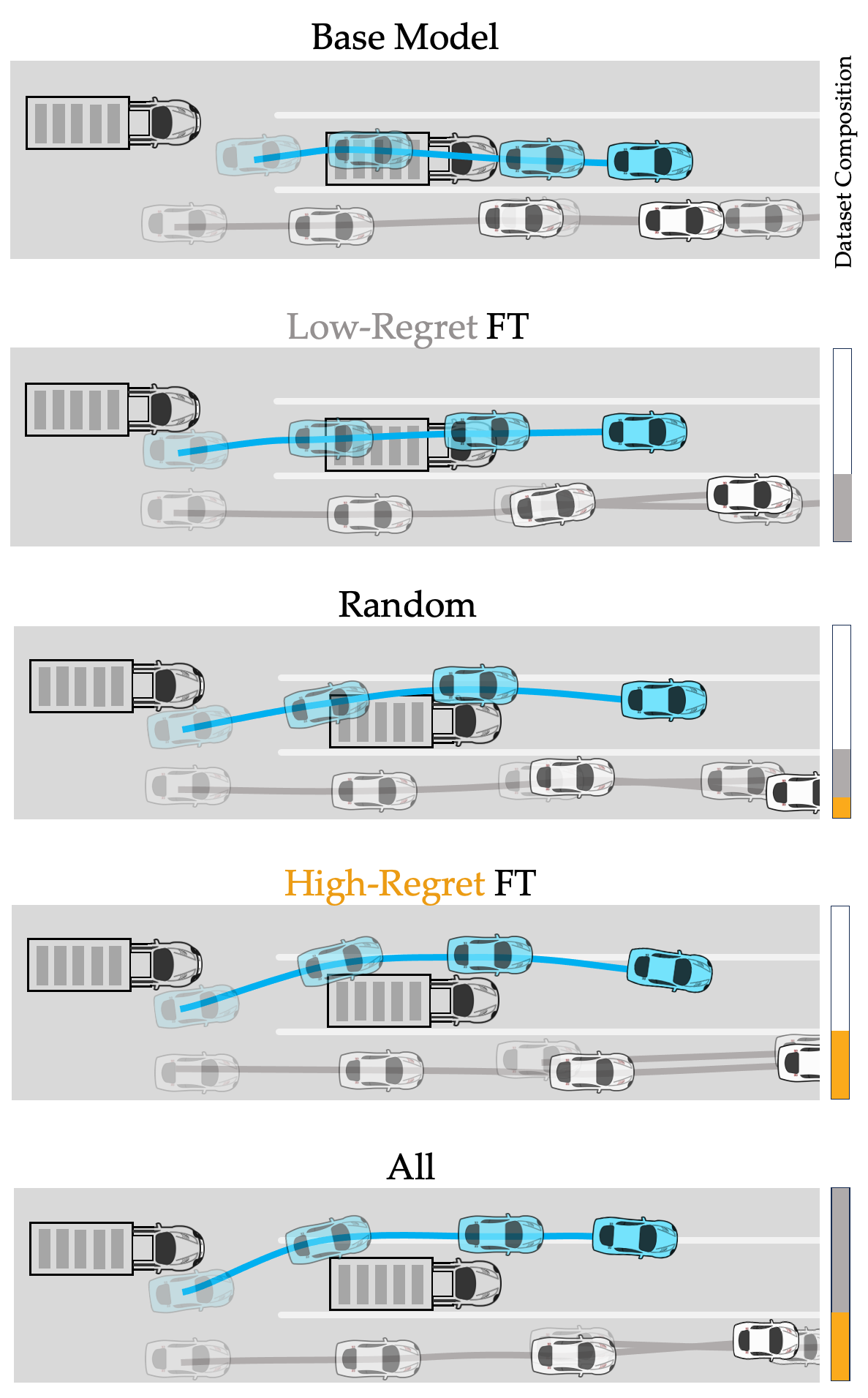 Not All Errors Are Made Equal: A Regret Metric for Detecting System-level Trajectory Prediction FailuresIn 8th Annual Conference on Robot Learning, 2024
Not All Errors Are Made Equal: A Regret Metric for Detecting System-level Trajectory Prediction FailuresIn 8th Annual Conference on Robot Learning, 2024
2023
- CoRL
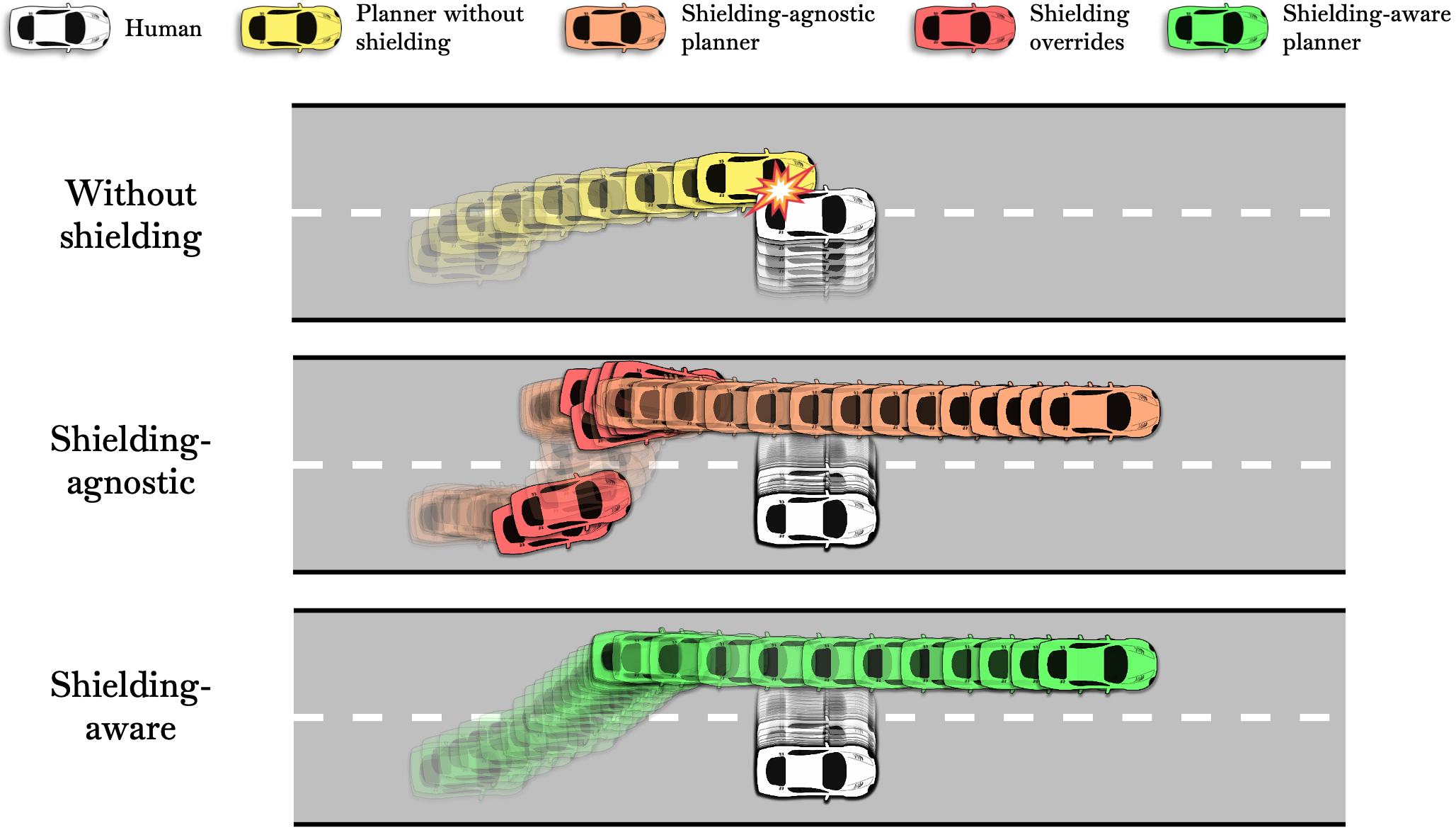
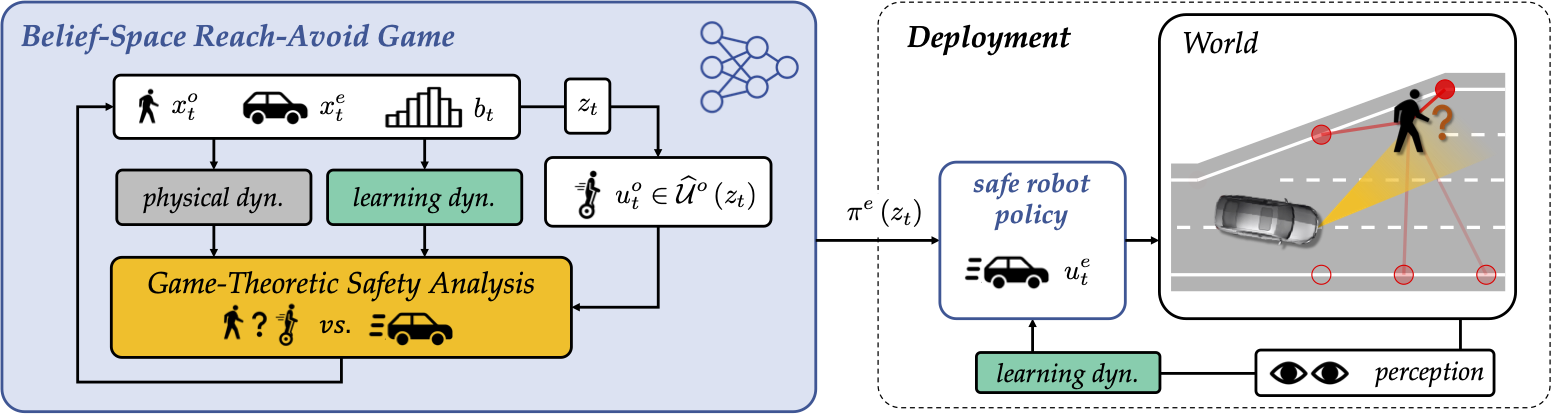 Deception Game: Closing the Safety-Learning Loop in Interactive Robot AutonomyIn 7th Annual Conference on Robot Learning, 2023
Deception Game: Closing the Safety-Learning Loop in Interactive Robot AutonomyIn 7th Annual Conference on Robot Learning, 2023 - CDC
 Emergent Coordination through Game-Induced Nonlinear Opinion DynamicsIn 2023 62nd IEEE Conference on Decision and Control (CDC), 2023
Emergent Coordination through Game-Induced Nonlinear Opinion DynamicsIn 2023 62nd IEEE Conference on Decision and Control (CDC), 2023 - ICRA
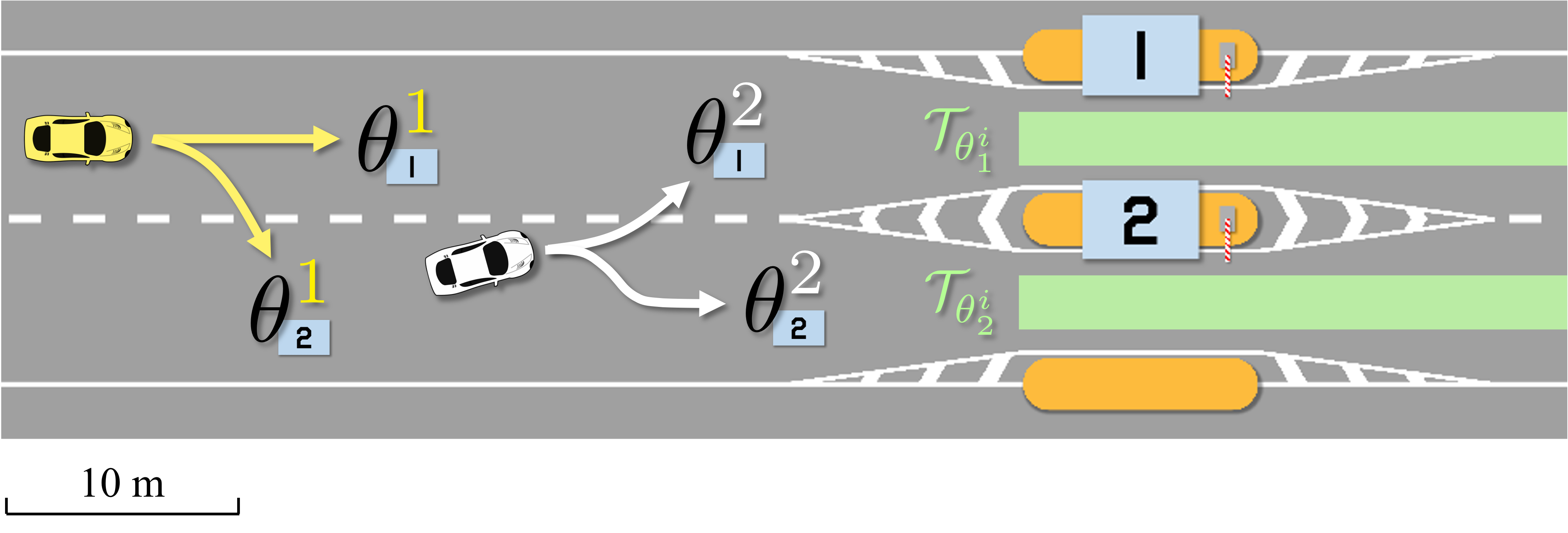
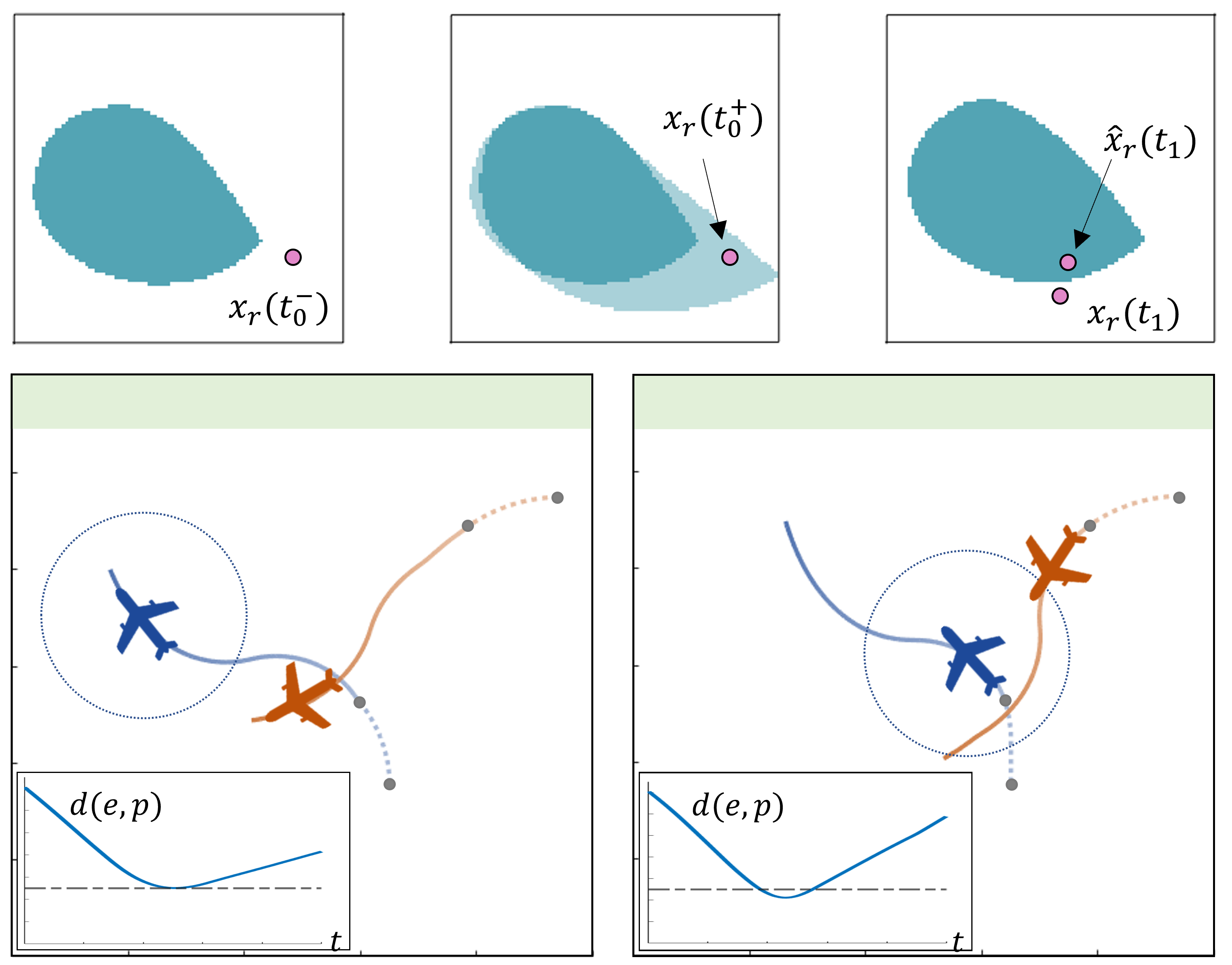 Parameter-Conditioned Reachable Sets for Updating Safety Assurances OnlineIn 2023 International Conference on Robotics and Automation (ICRA), 2023
Parameter-Conditioned Reachable Sets for Updating Safety Assurances OnlineIn 2023 International Conference on Robotics and Automation (ICRA), 2023 - ICRA
 Online Update of Safety Assurances Using Confidence-Based PredictionsIn 2023 International Conference on Robotics and Automation (ICRA), 2023
Online Update of Safety Assurances Using Confidence-Based PredictionsIn 2023 International Conference on Robotics and Automation (ICRA), 2023