Kensuke Nakamura

I am a Ph.D. student at Carnegie Mellon University’s Robotics Institute where I am advised by Prof. Andrea Bajcsy. My research leverages the synergy between optimal control and generative models to allow robots to safely operate in unstructured and uncertain environments. I develop theory and algorithms grounded in systems such as autonomous vehicles that use learned trajectory forecasters during planning or robotic manipulators that use world models to understand nuanced safety constraints. I was named a 2025 HRI Pioneer and I am fortunate to be supported by the NSF Graduate Research Fellowship.
This summer I will be interning at NVIDIA with the Autonomous Vehicle Research group led by Prof. Marco Pavone.
Previously, I graduated from Princeton University where I was advised by Jaime Fernández Fisac and Naomi Ehrich Leonard. I have also had the pleasure of collaborating with Somil Bansal.
E-mail / Google Scholar / Github / Twitter
news
| Feb 11, 2026 | I gave a talk to the RobIn lab at UT Austin! I talked about fundamentals of safety-critical control (Hamilton-Jacobi Reachability and Control Barrier Functions) and two works that extended these concepts to latent safety filters. |
|---|---|
| Jan 23, 2026 | How to Train Your Latent Control Barrier Function got accepted as an oral presentation at L4DC 2026! |
| Nov 23, 2025 | Excited to share that we extended the paradigm of latent safety filtering to optimization-based filters in the style of Control Barrier Functions. While theory tells us extending HJ value functions to act as CBFs should be straightforward, we identified and remedied two key details to make it work in practice. Details in the project website here |
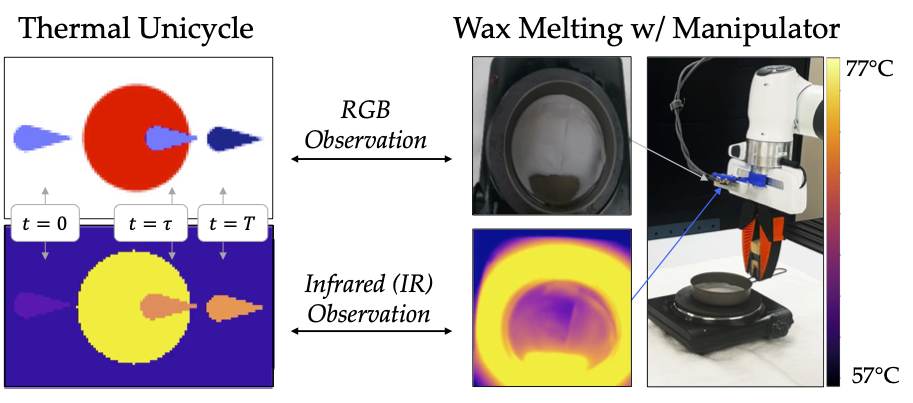
| Oct 01, 2025 | Two new papers extending latent safety filters! In Anysafe we explore how to parameterized latent safety filters in order to flexibly specify constraints at deployment time. In our second work we study temperature-based constraints to investigate how partial observability can degrade the ability of latent safety filters to prevent safety violations. We quantify partial observability in the latent space of self-supervised world models using mutual information and provide a multimodal training strategy for effective filtering even under partial observability! |
| May 01, 2025 | Our new paper strengthens latent safety filters by allowing them to account for out-of-distribution failures by treating regions where a world model has high uncertainty as a safety violation. This work was lead by Junwon Seo and the project website is here. |
selected publications
- L4DC
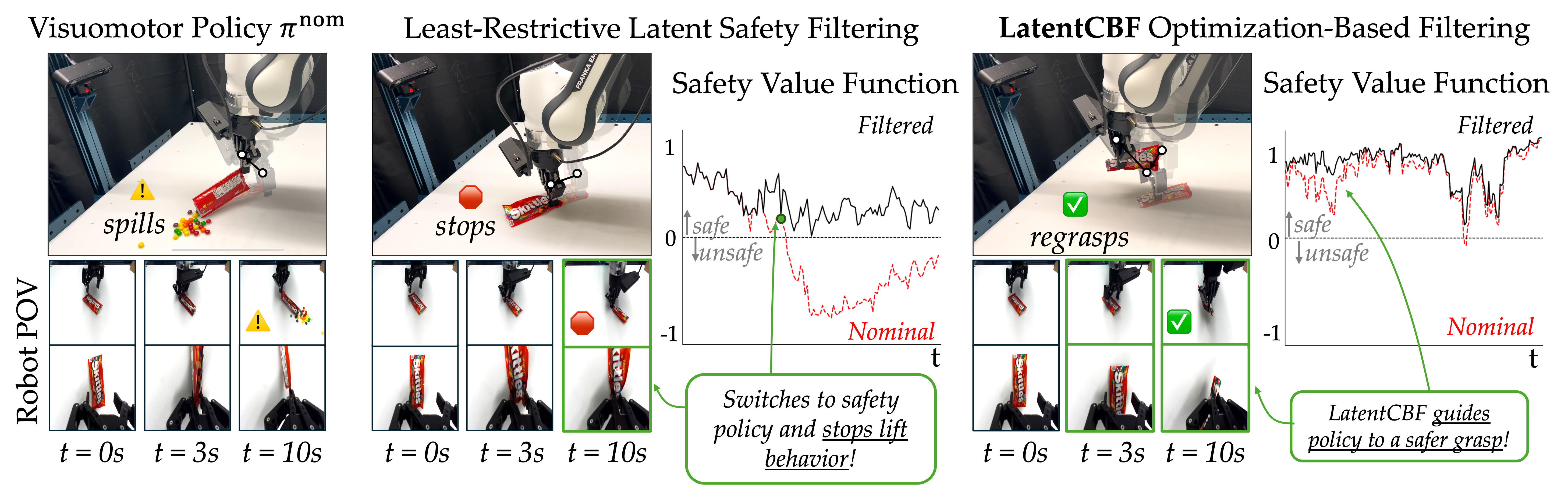 How to Train Your Latent Control Barrier Function: Smooth Safety Filtering Under Hard-to-Model ConstraintsarXiv preprint arXiv:2511.18606, 2025
How to Train Your Latent Control Barrier Function: Smooth Safety Filtering Under Hard-to-Model ConstraintsarXiv preprint arXiv:2511.18606, 2025 -
 What You Don’t Know Can Hurt You: How Well do Latent Safety Filters Understand Partially Observable Safety Constraints?arXiv preprint arXiv:2510.06492, 2025
What You Don’t Know Can Hurt You: How Well do Latent Safety Filters Understand Partially Observable Safety Constraints?arXiv preprint arXiv:2510.06492, 2025 - ICRA
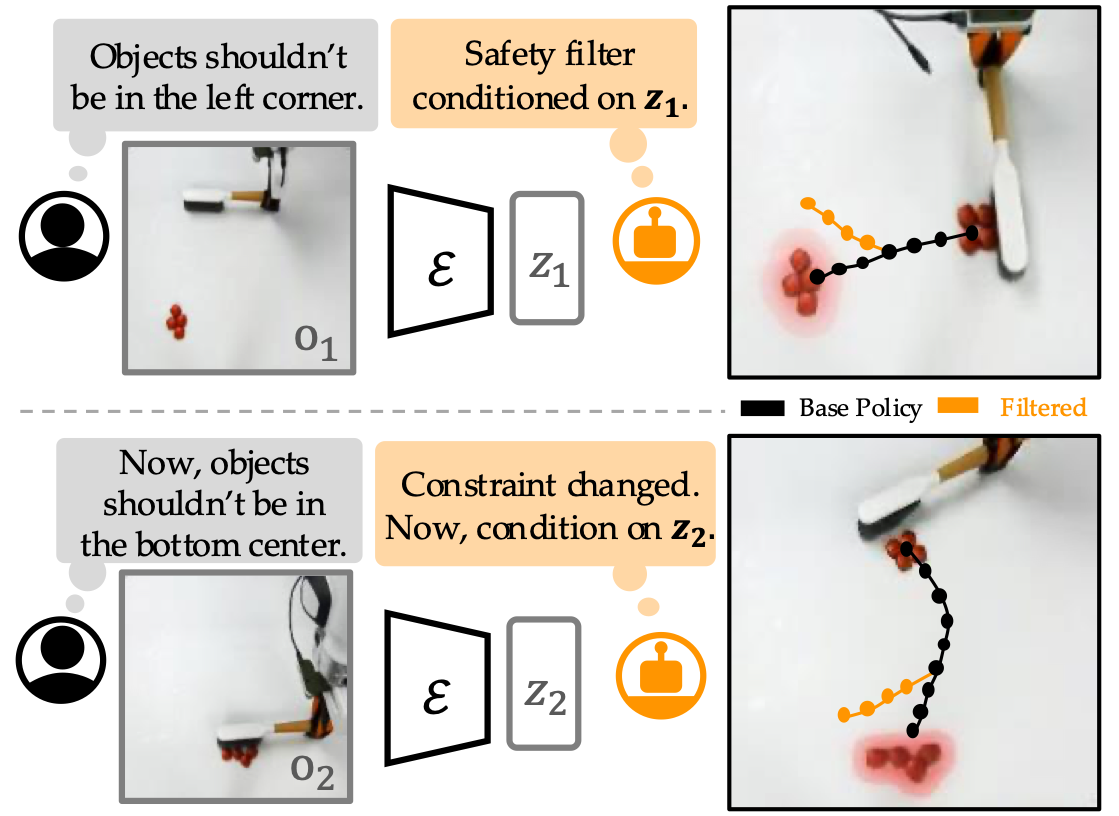 AnySafe: Adapting Latent Safety Filters at Runtime via Safety Constraint Parameterization in the Latent SpaceIn IEEE International Conference on Robotics and Automation (ICRA), 2026
AnySafe: Adapting Latent Safety Filters at Runtime via Safety Constraint Parameterization in the Latent SpaceIn IEEE International Conference on Robotics and Automation (ICRA), 2026 - CoRL
 Uncertainty-aware Latent Safety Filters for Avoiding Out-of-Distribution FailuresIn Conference on Robot Learning, 2025
Uncertainty-aware Latent Safety Filters for Avoiding Out-of-Distribution FailuresIn Conference on Robot Learning, 2025 - RSS
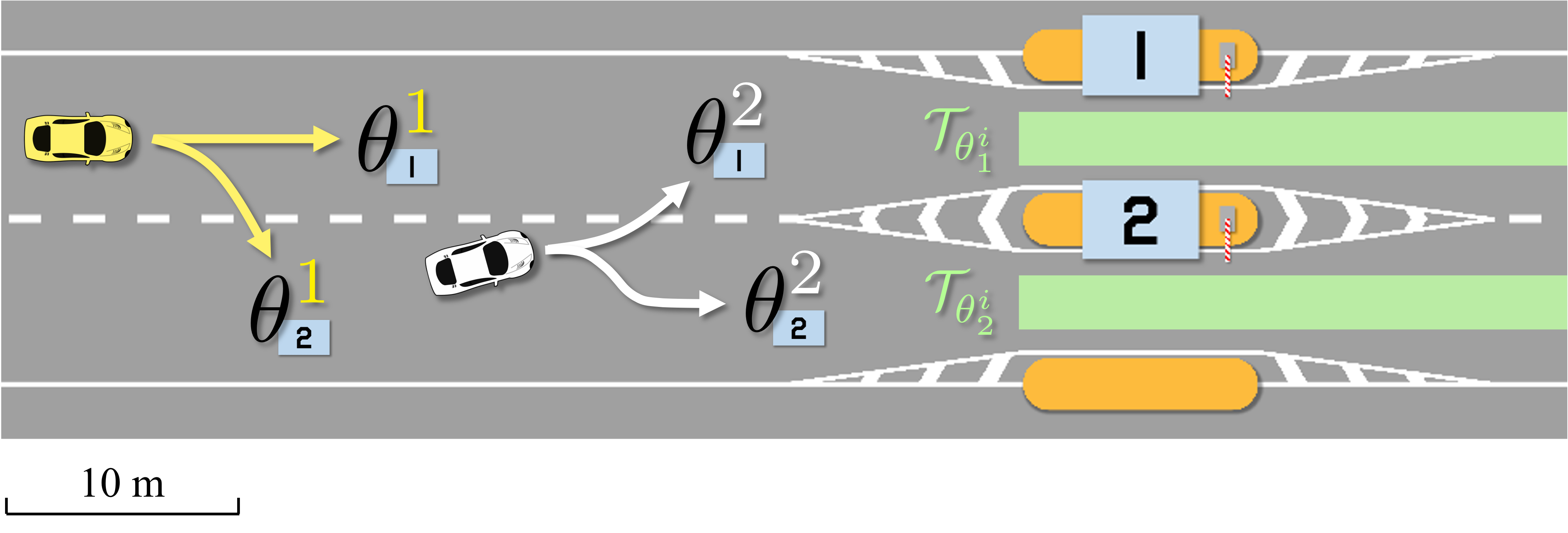
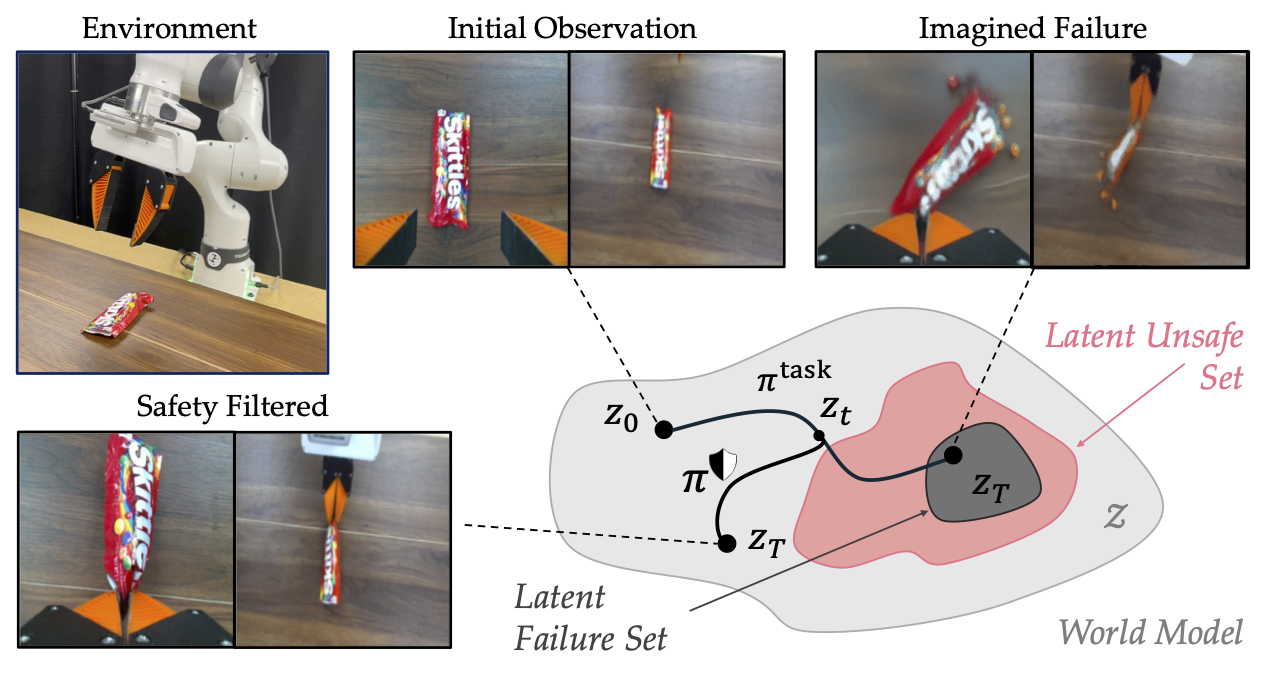 Generalizing Safety Beyond Collision-Avoidance via Latent-Space Reachability AnalysisIn Robotics: Science and Systems, 2025
Generalizing Safety Beyond Collision-Avoidance via Latent-Space Reachability AnalysisIn Robotics: Science and Systems, 2025 - CoRL
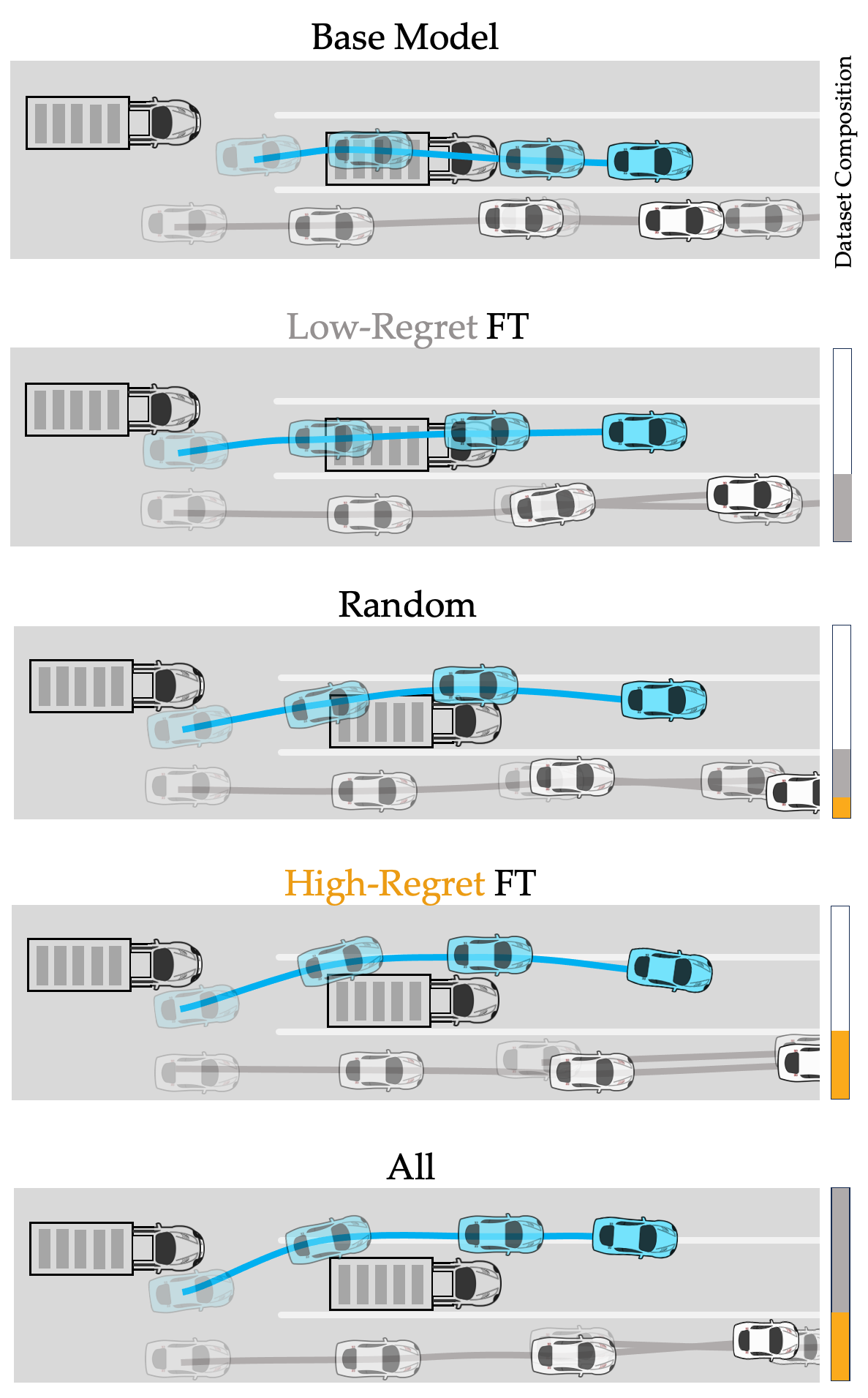 Not All Errors Are Made Equal: A Regret Metric for Detecting System-level Trajectory Prediction FailuresIn 8th Annual Conference on Robot Learning, 2024
Not All Errors Are Made Equal: A Regret Metric for Detecting System-level Trajectory Prediction FailuresIn 8th Annual Conference on Robot Learning, 2024 - CoRL
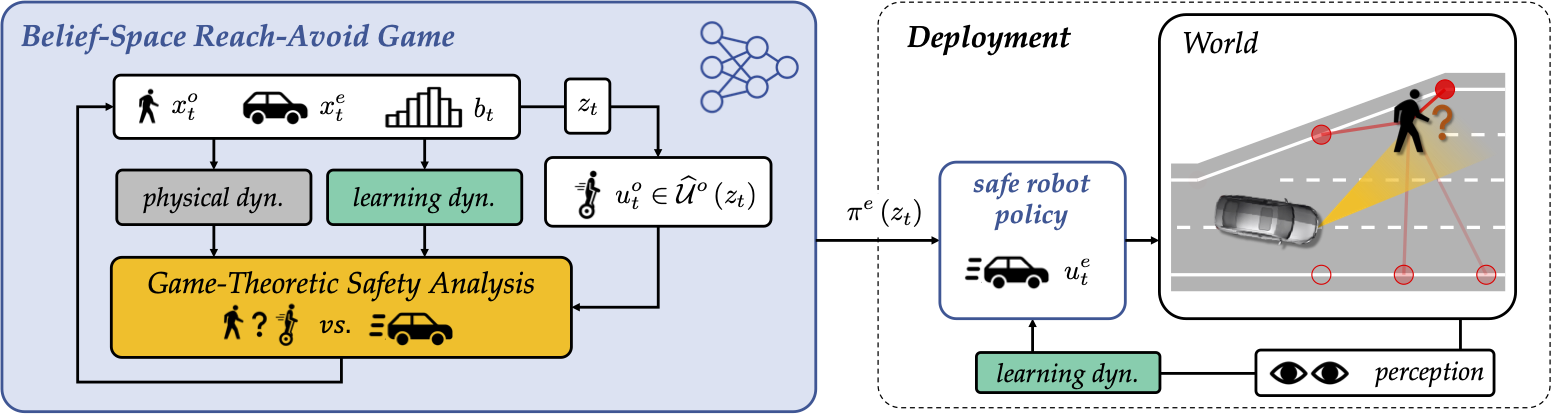 Deception Game: Closing the Safety-Learning Loop in Interactive Robot AutonomyIn 7th Annual Conference on Robot Learning, 2023
Deception Game: Closing the Safety-Learning Loop in Interactive Robot AutonomyIn 7th Annual Conference on Robot Learning, 2023 - CDC
 Emergent Coordination through Game-Induced Nonlinear Opinion DynamicsIn 2023 62nd IEEE Conference on Decision and Control (CDC), 2023
Emergent Coordination through Game-Induced Nonlinear Opinion DynamicsIn 2023 62nd IEEE Conference on Decision and Control (CDC), 2023 - ICRA
 Online Update of Safety Assurances Using Confidence-Based PredictionsIn 2023 International Conference on Robotics and Automation (ICRA), 2023
Online Update of Safety Assurances Using Confidence-Based PredictionsIn 2023 International Conference on Robotics and Automation (ICRA), 2023